









#amr#agv#물류자동화#물류로봇#오므론#팔레타이징#ai#마로솔#빅웨이브로보틱스
공정 개요
해당 도입사례는 오므론 AMR 물류로봇과 AI 기반의 팔레타이징 시스템을 결합하여 물류 자동화를 구현한 솔루션입니다. 고객사는 미래 경쟁력을 위해 인공지능을 접목한 물류 자동화 시스템을 도입하고, 비용 절감과 효율성을 극대화하기 위해 팔레타이징 및 물품 반송 자동화에 높은 관심을 보였습니다.
본 솔루션은 다양한 형태의 물품을 자율적으로 이동 및 적재하여 입출고 과정의 효율성과 정확성을 향상시키며, 작업자의 물리적 부담을 줄이고 안전성을 확보했습니다.
프로젝트 배경 및 목적
고객사는 미래 물류 경쟁력을 위해 인공지능 기반의 자동화 솔루션을 도입하여 물류 운영의 효율성을 최적화하고 비용을 절감하고자 했습니다. 특히 반복적이고 무거운 팔레타이징 작업과 물품 반송 작업에서 자동화가 절실히 필요했습니다.
본 프로젝트의 목적은 AMR과 산업용 로봇을 통해 출고 작업의 효율성을 극대화하고, 작업자의 안전을 보장하며, 실시간 물품 추적 관리를 실현하는 데 있습니다. 이를 통해 물류 현장의 생산성을 높이고, 미래 물류 운영의 안정성과 유연성을 확보하고자 했습니다.
구성요소
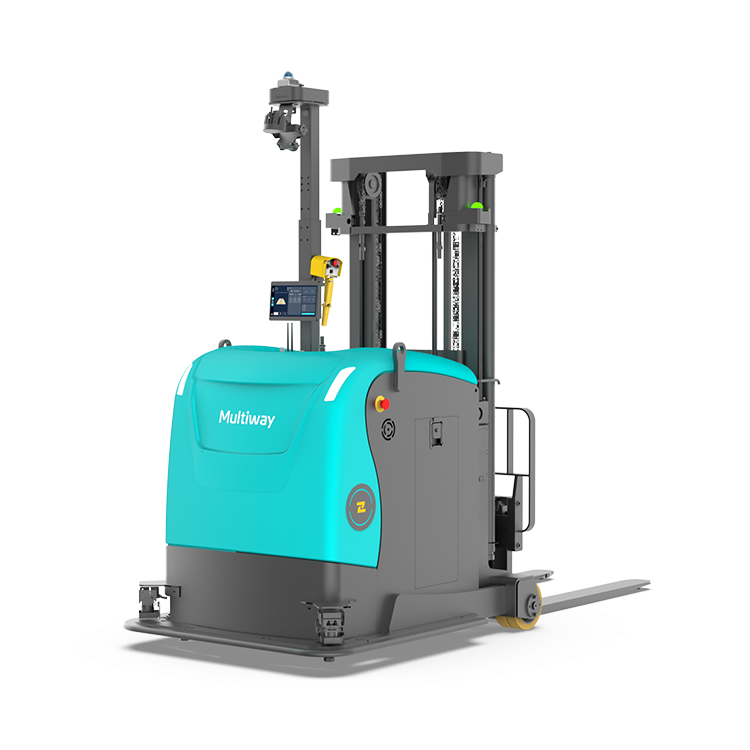
| 로봇 | 오므론 AMR 물류로봇: 자율 주행으로 장애물을 회피하며 이동하는 기능을 갖춘 물류로봇으로, 대차와 쉽게 결합 및 분리되어 자유롭게 반송 작업을 수행합니다. |
|---|---|
| 주변기기 | AI 기반 팔레타이징 시스템: 다양한 크기의 박스를 AI 알고리즘을 통해 최적화하여 적재하며, 박스의 형태와 무게에 맞춰 효율적으로 쌓을 수 있습니다. 세이프티 라이트커튼 및 펜스: 작업자와 로봇의 구역을 시각적 방어막으로 구분하여 작업자가 팔레타이징 구역에 접근하면 즉시 동작을 멈추어 안전성을 보장합니다. 입출고 및 추적 관리 시스템: 각 제품의 입출고 상태를 실시간으로 모니터링하며, 물류 과정의 정확성을 유지합니다. |
작업순서
| STEP 1. | 출고 명령: 작업자가 출고 버튼을 누르면 AMR이 물류 관리 시스템으로부터 출고 명령을 받고 자율 주행으로 대차가 위치한 곳으로 이동합니다. |
|---|---|
| STEP 2. | 대차 준비 및 고정: AMR이 대차를 인식하고 후크로 고정하여 안정적인 운반 준비를 완료합니다. |
| STEP 3. | 피킹 스테이션 도착: AMR이 피킹 스테이션으로 이동하여 물품 적재를 위한 팔레타이징 준비를 합니다. |
| STEP 4. | 팔레타이징: 산업용 로봇이 AI 알고리즘을 활용하여 박스를 최적화된 방식으로 대차 위에 쌓습니다. |
| STEP 5. | 만재 대차 회수: 대차가 가득 찬 상태가 되면 AMR이 이를 자동으로 인식하고 지정된 출고지로 회수 작업을 진행합니다. |
| STEP 6. | 출고지 도착 및 배출: AMR이 출고지에 도착해 대차를 분리하고, 입출고 관리 시스템을 통해 물품 상태를 실시간으로 추적합니다. |
| STEP 7. | 작업 종료 및 충전 복귀: 작업이 끝난 후 AMR은 자동으로 충전기 위치로 복귀하여 다음 작업을 준비합니다. |
※ 마로솔 내의 모든 콘텐츠를 무단으로 복사 및 재창작할 경우 부정경쟁방지법 및 저작권법에 위반될 수 있음을 밝힙니다.