









#머신텐딩#머시닝센터#다관절로봇#GP12#WIA#야스카와#컨베이어#CNC
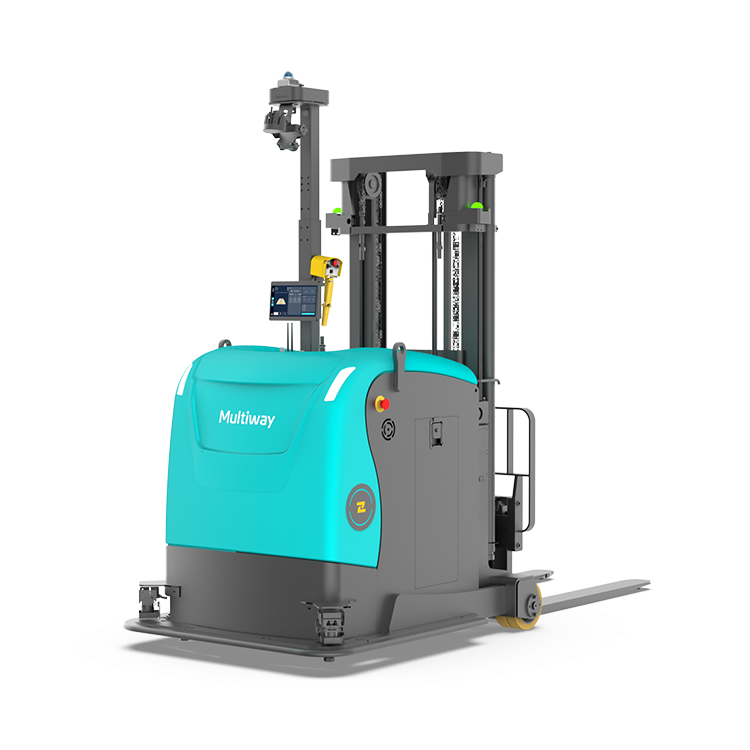
YASKAWA 로봇을 활용하여 WIA MCT(F410D) 3대에 대한 금속 가공물의 투입과 배출을 자동화한 머신텐딩 자동화 솔루션입니다.
기존 공정에서는 작업자가 장비 앞에서 지속적으로 대기하면서 가공품 투입을 일일이 수행했어야 하나 작업물 투입 배출은 로봇이 수행하고 작업자는 전체 장비 관리 및 운영에 집중하여 운영효율을 크게 증대했습니다.
또한 로봇 1대로 3대의 가공기기를 대응함으로써 생산성을 크게 향상 시킬 수 있습니다.
구성요소
| 로봇 | YASKAWA GP12
- 6축 다관절, 가반하중 12kg, 작업반경 1,440mm, 무게 150kg
반복정밀도 ±0.08 mm |
|---|---|
| 주변기기 | 툴:
공압 그리퍼 2EA
에어블로잉 툴
대응장비:
위아 머시닝센터 F410D 3EA
듀얼 테이블
SIEMENS 828D 컨트롤러 적용
주변기기:
로봇 고정 베이스
작업물 투입 컨베이어
에어블로잉 스테이션
작업물 배출 컨베이어 |
작업순서
| STEP 1. | 가공대상물 2개를 투입컨베이어로부터 픽업 |
|---|---|
| STEP 2. | 가공 대상물을 지그에 안착하여 재정렬 |
| STEP 3. | 공작기내 가공지그 에어블로잉 작업 수행 |
| STEP 4. | 가공대상물 투입 및 가공 시작 |
| STEP 5. | (가공 중 다른 장비 가공 대상물 투입) |
| STEP 6. | 완료된 작업물 픽업 전 에어블로잉 작업 수행 |
| STEP 7. | 완료된 작업물 2EA 픽업 |
| STEP 8. | 픽업한 작업물 에어블로잉 스테이션에서 2차 에어블로잉 작업 수행 |
| STEP 9. | 작업 완료된 대상물을 배출 컨베이어에 언로딩 |
※ 마로솔 내의 모든 콘텐츠를 무단으로 복사 및 재창작할 경우 부정경쟁방지법 및 저작권법에 위반될 수 있음을 밝힙니다.