









#PLC#발해로봇#물류센터#스토커#리프트#미쓰비시#컨베이어
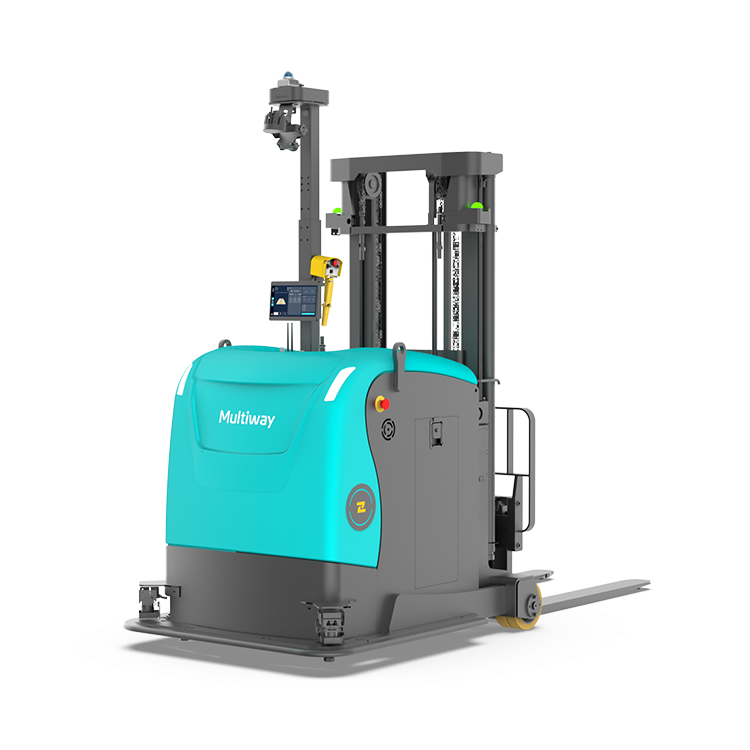
본 솔루션은 스토커를 이용해 라인을 따라 이동하며 컨베이어를 이용해 자동으로 상자를 이적재하는 솔루션입니다.
스토커를 이용해 높은 곳에 상자를 이적재하여 기존 방식보다 빠르게 상자를 옮김으로 생산성을 확보하였습니다. 또 위험한 작업으로 부터 작업자를 분리해 안전사고의 위험도 크게 낮출 수 있으며 스토커의 이동부분이 PLC 제어로 구성되어 유지보수 또한 편리합니다.
구성요소
| 로봇 | -스토커
-PC 시스템
-미쓰비시 MELSEC-Q PLC
-미쓰비시 MELSEC-FX PLC
-바코드
-스토커 이동라인
-컨베이어 |
|---|
작업순서
| STEP 1. | 출고: PC로 출고하고자 하는 박스의 위치를 선택 |
|---|---|
| STEP 2. | 해당 박스의 위치로 스토커가 라인을 따라 이동 |
| STEP 3. | 다시 라인을 따라 스토커가 컨베이어 위치로 이동 |
| STEP 4. | 박스를 컨베이어에 적재 |
| STEP 5. | 출고 |
| STEP 6. | 앞의 과정을 반복 |
| STEP 7. | 입고: PC로 입고하고자 하는 박스의 위치를 선택 |
| STEP 8. | 박스를 스토커에 적재 |
| STEP 9. | 라인을 따라 입고하고자 하는 위치로 이동 |
| STEP 10. | 박스를 정해진 위치에 입고 |
| STEP 11. | 원위치로 복귀 |
| STEP 12. | 앞의 과정을 반복 |
※ 마로솔 내의 모든 콘텐츠를 무단으로 복사 및 재창작할 경우 부정경쟁방지법 및 저작권법에 위반될 수 있음을 밝힙니다.
라인을 따라 이동하며 상자를 이적재하는 자동화 창고
- 수행업체
- 로그인 후 확인 해 주세요
- 예상 프로젝트 기간
- 9주(설계 3주, 제작 3주, 설치 및 시운전 3주)
- 예상금액
- 로그인 후 확인 해 주세요
- 로봇 모델
- -